 当前位置:
当前位置:
七月五日










缪宗睿 :
今天是我们学习机器人的第五天,老师先是让我们自主学习“跟屁虫”,我完成的非常顺利,还得到了老师的加分和奖励。接下来老师简要说明了一下最后两天的任务,刚刚说完,同学们就七嘴八舌的议论起来,我和季陈有幸和全班仅有的两个女生为一组,于是也不甘示弱的讨论起来。刚开始,因为我们四个人的意见不能统一,所以一直没有一点进展,到后来,我提出了轮流发言的办法,于是一个个问题都迎刃而解了。最后我们决定的主题是“科学改变生活”,准备两个女生装饰土豆号,季陈制作PPT,而我就是做编程的;我们有两个小土豆舞蹈者,一个小土豆作为巡逻车。更多计划还要等明天的进展。我很期待明天能够完成我们的设计!
周宇曦:
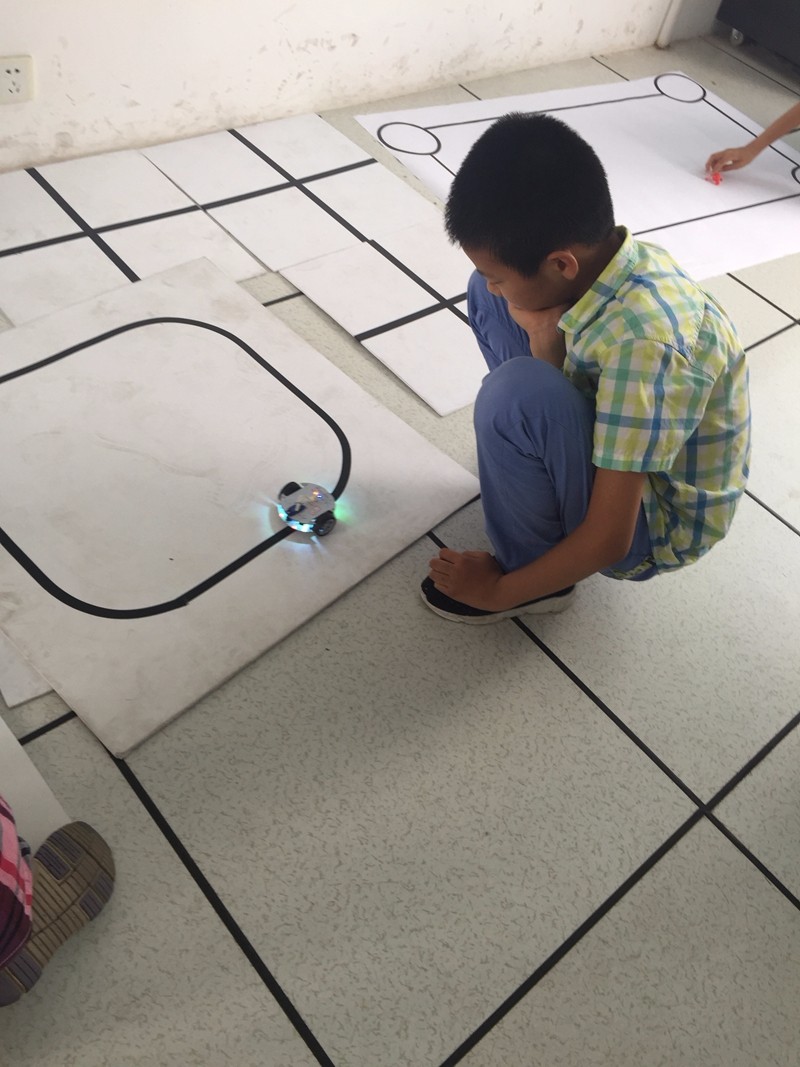
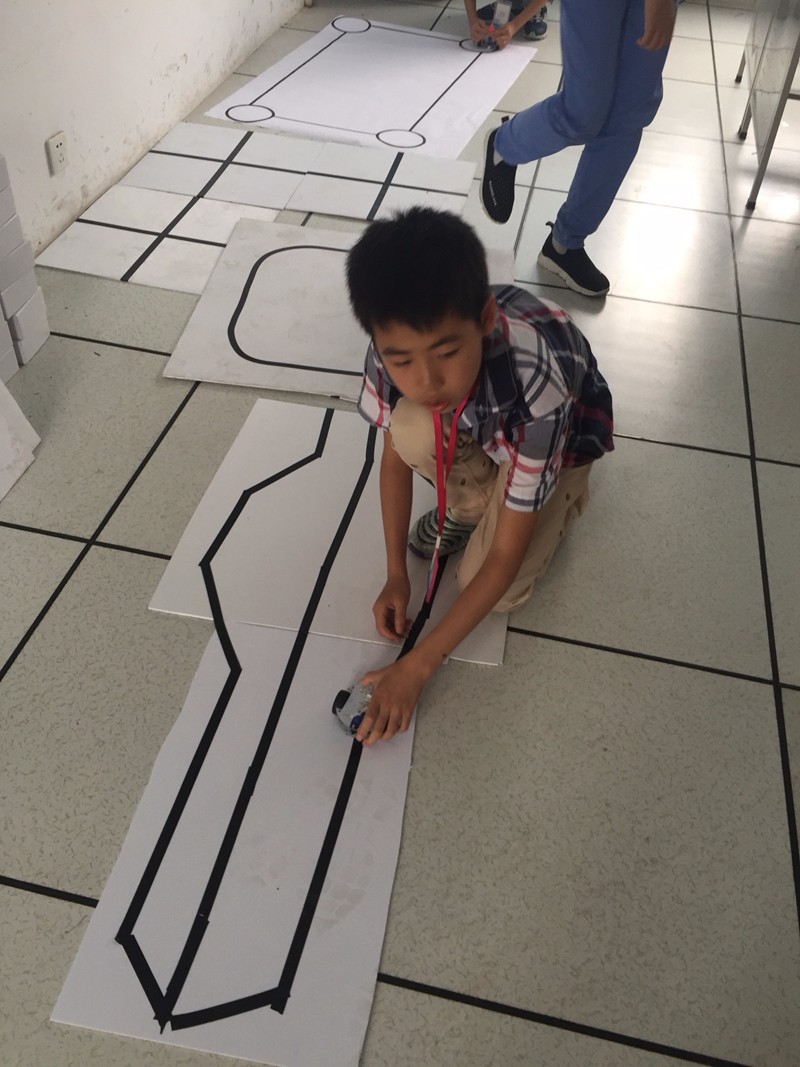
如果有一个人,一直跟在另一个人后面,那么他就是另一个人的跟屁虫了!今天,我们也用“土豆”做了一个跟屁虫。首先,我们利用前面的两个避障传感器如果值小于700就后退,如果值大于900了就进,如果值大于700且小于900就停。如果左边值大于右边值,就左转。如果右边值大于左边值,就右转。上传成功了,一运行,“土豆”果然跟着我走了,可怎么一直在抖呢?我想了好久,这才明白:比较的值多一点范围,可以少抖动。再试,小车终于不抖了!我乐开了花。[傻笑]
袁帅 :
今天,我们一起制作了“跟屁虫”装置,他可以跟踪一个物品,随物品左转,右转。我用了复杂的“如果”程序,但上传后发现智能小车只能向前走。我很疑惑,检查了一遍程序才发现原来我少用了一个“如果”程序。我重新修改后,果然,小车总算能随着我的手行走自如了。原来编程的时候要细心,我真开心!
七月六日
芮天一 :
一整个下午,只听得大家来回踱步的脚步声。我们组也不例外,一刻都没停下来。虽然有凉爽的空调风吹来,但大家还是紧张的冒出汗来。我们组在制作过程的道路上一路坎坎坷坷,许许多多的问题都成为了一个个绊脚石,时不时的就出现在脚跟前,但在我们的努力下还是勇敢的翻了过去。有付出总有回报,经过三个小时的辛勤努力,终于收获了还算满意的成果,三人脸上都挂上了那最美的笑容。
周子杰:
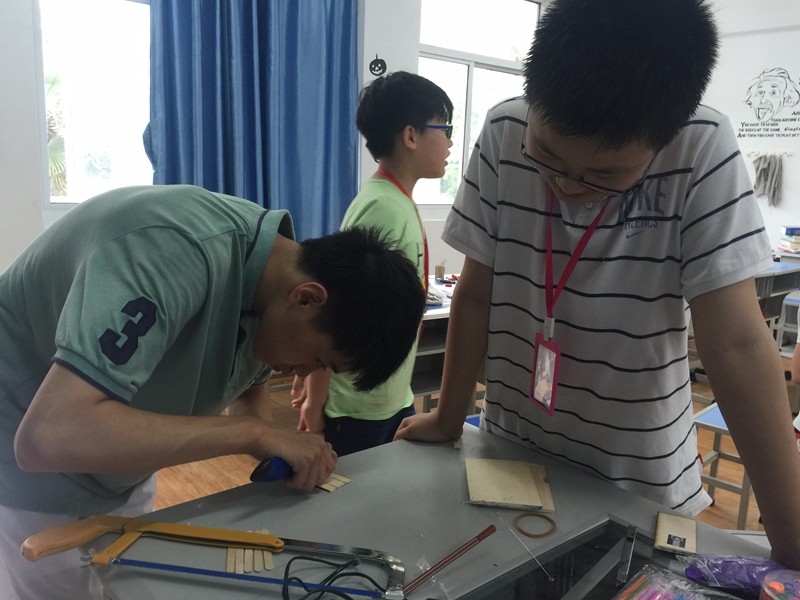
今天我们的最终团体项目开始制作了!我在我们小组担当着编程的重任,陈果负责路线设计,党新亚和张言则负责外形设计与制作。
老师一说完注意事项我们就各奔自己的“战场开战了”!
我和陈果的“战场”是电脑房,我先做循迹程序,而在我在做循迹程序的时候,陈果则在画路线图。等双方都做好了之后,我们开始讨论舵机,级联彩灯,前大车灯等的动作。但把循迹程序和舵机之类的放到一起时,要么是舵机之类的动,循迹程序没反应,要么循迹程序有反应,舵机之类的不动。这到底是怎么一回事呢?[疑问]无奈之下,我们只好向老师求助,最后通过我们的努力,所有程序按期完工了。
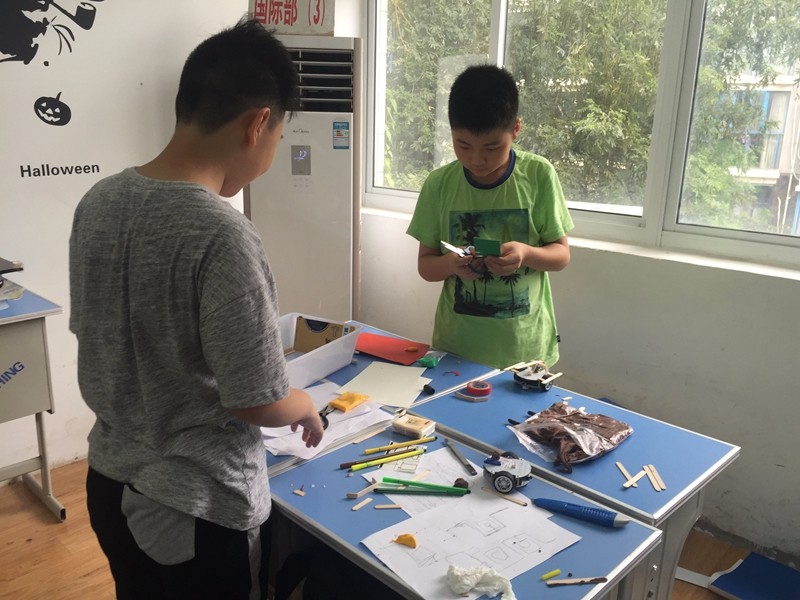
党新亚和张言的“战场”则是设计房,他们左一卷胶带右一把剪刀。一张张卡纸,一块块黏土,一卷卷双面胶......在他们手中变成了一件件小车的衣服。看那小车上的一面小旗,加上栩栩如生的火箭,那样子真是又炫又酷又帅气。
希望明天的展示能成功!加油![加油][加油][加油]
袁帅 :
今天,老师让我们自由创作了程序。我们组奇思妙想,终于决定用“保安抓学生”为主题,营造了一个既有趣无比又不失幽默感的校园故事。我们组用彩色卡纸、剪刀、胶水、透明胶、双面胶、冰棒棍的装饰了小车。我们组还用了跟屁虫程序、巡线程序、跳舞程序、连接彩灯程序、舵机程序和大灯程序制作了3个惟妙惟肖的智能小车。我们很开心!









七月七日
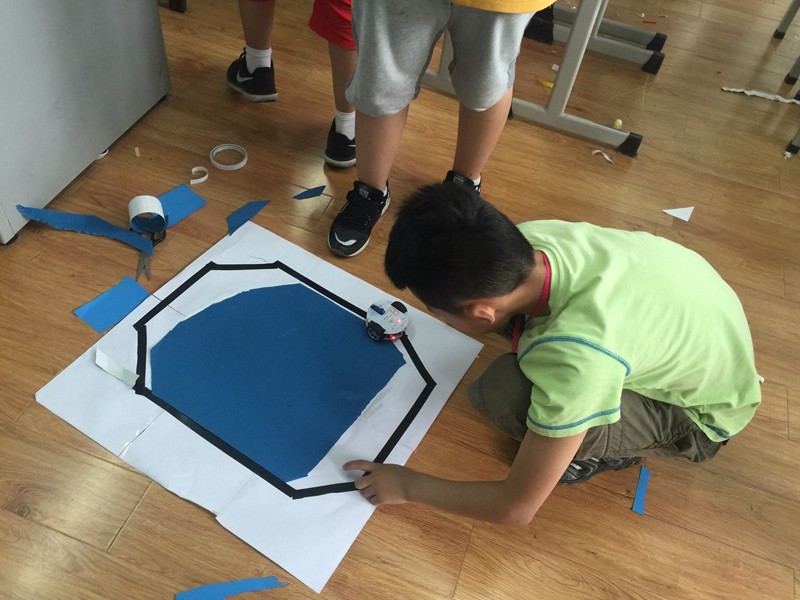
通过项目式学习,同学们了解了小车的前行、旋转,灰度、避障传感器的使用。最后三天的任务是同学们采用小组合作的方式设计一个自主项目。拿到任务后同学们马上进行了组队、交流、讨论,一个小时不知不觉就过去了,空白的纸上也留下了精彩的故事。第二天进入设计制作阶段,小组成员分工明确,有的做机器人美工,有的做场景布局,有的做程序编写……大家都忙的不可开交,真实的场景,栩栩如生的智能机器人,在同学们的创作下都生动起来。最后一天是展示交流,同学们结合场景讲着故事,小土豆们在卖力的表演。警察抓小偷,两军交战,未来机器人……创意无限。在这次活动中同学们学到的不仅是如何编程,如何搭建小车,更多的是不怕失败,坚持不懈的精神。刘老师寄语同学们科技创新永不止步。少年,热爱科学吧!






























(王培霞 文图供稿)
 校长信箱
校长信箱 OA入口
OA入口 站内管理
站内管理 访问量统计
访问量统计